The “old school” path planning pipeline is:
1
Path Planning -> Trajectory Optimization
A Star
Setup:
- Maintain a priority_queue to store all nodes to expand
- The priority queue is initialized with the start state
- Use a heuristic (a guess of future cost to goal from the current state) as a guidance to determine which node to expand next
- Discretize the world into a grid (voxel/pixel).
- Initialize true cost g(x_s) = 0, other nodes are g(x_n) = inf
Algorithm:
- If the queue is empty, return false; break
- Pop the element
nwith the lowestf(n) = h(n) + g(n)from the queue- Mark
nas expanded
- Mark
- If
nis the goal, return - For all unexpanded neighbors
mofn:- If
g(m) = infinite,g(m) = g(n) + C_nm- Push
g(m)to the queue
- If
g(m) > g(n) + C_nmg(m) = g(n) + C_nm
- If
Questions
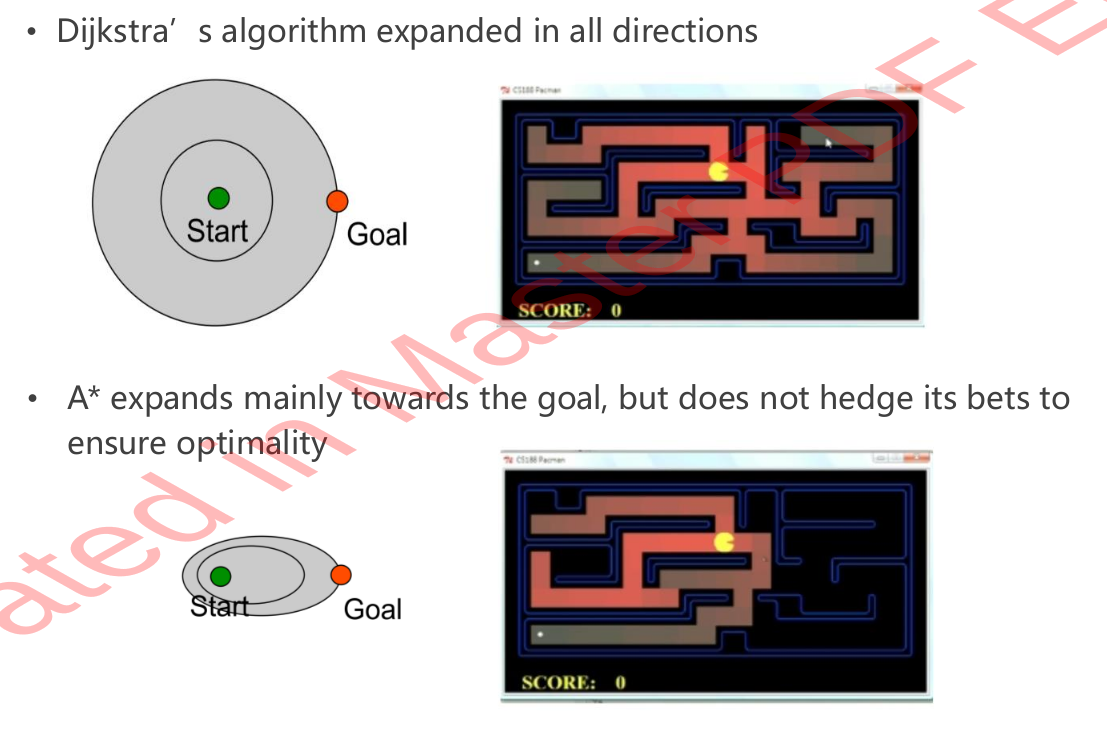
Why must the heuristics be admissible? (h(n) <= actual cost)
When heuristics is admissible, you can find the optimal path:
- In the extreme case
h(n) = 0(Djikstra’s Algorithm),- Nodes on the optimal path are guaranteed to be evaluated.
- This is because you always evaluate the node with the lowest actual cost.
- In the regualr admissible case,
- Because you start from all neighbors at beginning, In the worst case you will evaluate the entire map.
- Because you will expand “all unexpanded” neighbors
- In the case where you return when you hit the goal, the queue is not empty:
- Assume that in the queue, there is another node with smaller true cost
T'(n) = g(n') + C_n'goal. Because at the goal,f(goal)=g(goal), we know there are no other nodes that have smallerf(n') = g(n') + h(n'). Meanwhile, admissible heuristics meansh(n') < C_n'goal, we can guarantee that no other points in the queue would yield a smaller total cost
- Assume that in the queue, there is another node with smaller true cost
- Unexpanded nodes in the map will have worse
f(n'') = g(n'') + h(n'')than the remaining nodes left in the queue, their true cost must be worse than the goal node cost (which is the optimal path cost)
- Because you start from all neighbors at beginning, In the worst case you will evaluate the entire map.
When you have h(n) > actual cost: the search could miss nodes on the optimal path, because there could be a case where:
- When there are nodes left in the queue, their true cost T'(n) = g(n') + C_n'goal might be lower than the goal cost, despite that their f(n') = g(n') + h(n') is larger
- Also, the true cost of unexpanded nodes could be lower.
What Does a Good Heuristics Do?
Of course, a good heuristics is in practice what we need to do reduce the search tree. So, L2 norm is always admissible. Manhattan is admissible if you cannot travel in a diagonal manner
2D, 3D grid world is very structured. One can use a more precise heuristic than L2 norm to reduce the search space (in an entirely empty world):
\[\begin{gather*} \begin{aligned} & h(n) = d_x + d_y + (\sqrt{2} - 2) min(d_x, d_y) \end{aligned} \end{gather*}\]

Is Non-Admissible Heuristics Useless?
Not at all. If we have a weighted $f= g+ \epsilon h$, where a is larger towards the goal, we could have a smaller search space (hence faster), and find a suboptimal route. Weighted A*-> Anytime A*-> ARA*->D*
This is called “$\epsilon$-suboptimality”. It can be orders of magnitude faster than A star
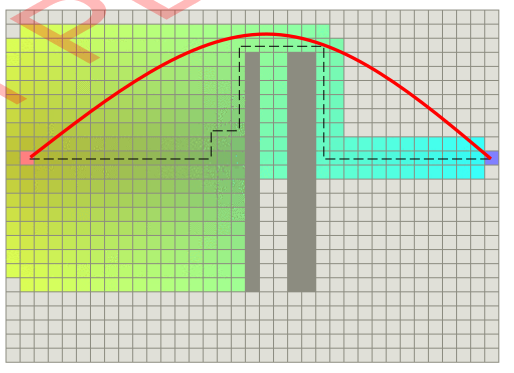
What are the Cons of A Star?
The path could be too close to an obstacle.
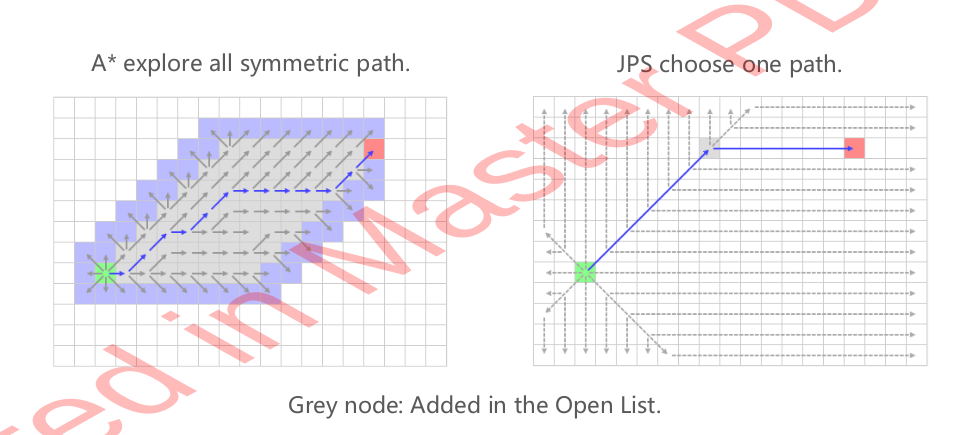
A Star Variant - Jump Point Search (JPS)
JPS is to break symmetry, because vanilla A star will search in the symmetric space:
KinoDynamic Planning
To address the “motion feasible issue” in Vanilla A Star, we can create a graph on velocity, acceleration, and force. This is kinodynamic planning, and the most straight planning is state lattice planning.
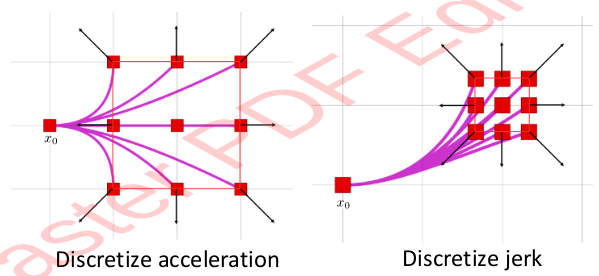
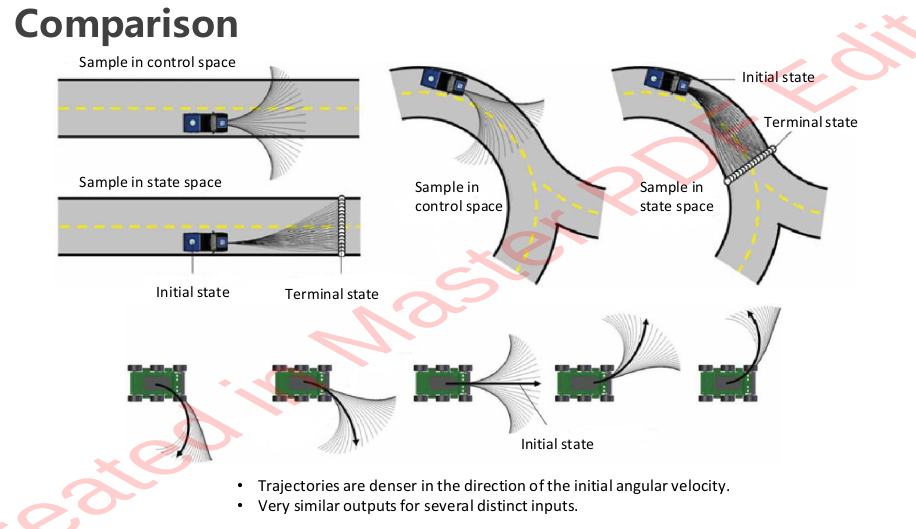
Sampling In Control Space - Low Planning Efficiency
Of course, we live in a discretized world. So one low-planning efficiency method is
- Sample in control space by: selecting a control vector
u - Forward simulate the control with numerical integration, for the duration of T:
u, Tare fixed
- Assuming acceleration is discretized (that it can change apruptly)
- State vector is:
Then, we can forward integrate the state using:
\[\begin{gather*} \begin{aligned} & s' = As + Bu \Rightarrow s = e^{At}s_0 + u \int_0^t e^{A(t-\tau)} B d\tau \\ & e^{At} = I + \frac{At}{1!} + \frac{(At)^2}{2!} + ... \end{aligned} \end{gather*}\]If A is “nilpotent”, that is $A^n = 0$, $e^{At}$ has a closed form expression.
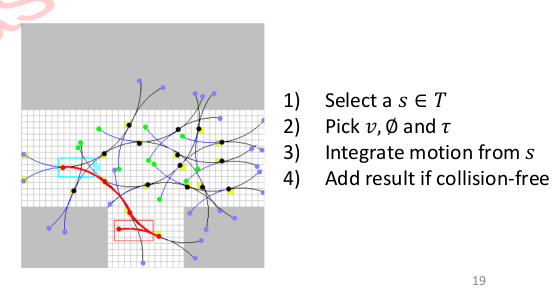
It’s low planning efficiency because it doesn’t provide mission guidance. So we instead sample in State Space:
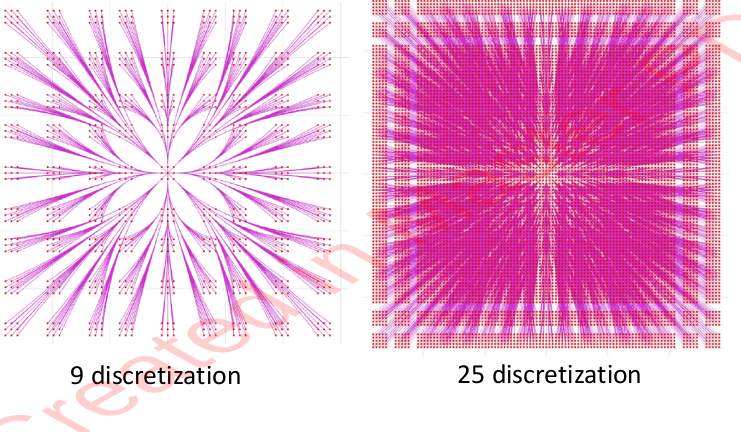
Sampling In State Space and Reed-Shepp Car Model
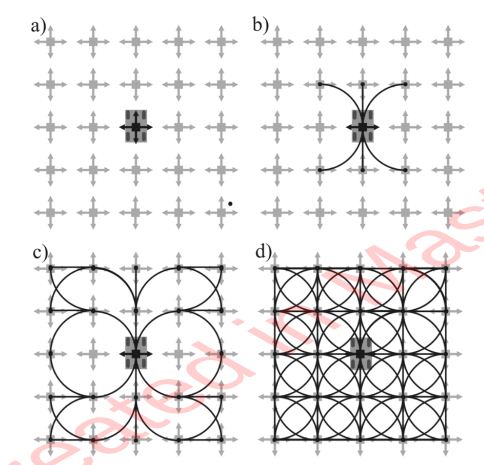
- Given an origin, for 8 neighbors, around the origin, solve for the control required
- Extend to the outer 24 neighbors
To solve for the control required, one model is the Reeds-Shepp Car Model,
\[\begin{gather*} \begin{aligned} & x' = v cos \theta \\ & y' = v sin \theta \\ & \theta' = v k \end{aligned} \end{gather*}\]With constraints -1<=v<=1, |k| <= 1/R_min, $R_{min}$ is the minimum arc. So the path is ultimately straight lines and arcs. Reed-Shepp Model allows bi-direction motion (backing up, and forward), and they are non-holonomic feasibility.
Compared to Control-Space Sampling, State Space sampling yields search-space denser close to its travelling direction
Then, the question becomes: “Design a trajectory that connects x(0) and x(T)”, a.k.a boundary value problem (BVP)
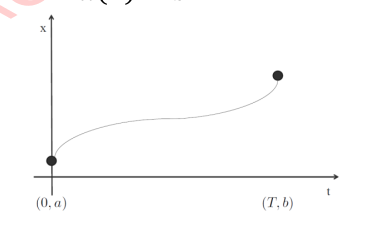
Optimal Boundary Value Problem (OBVP)
- Example, find a trajectory from t=0 to
t=T
- starts at
x(0)=a with x′(0)=0, x′′(0)=0, - ends at
x(T)=bwithx′(T)=0, x′′(T)=0
TODO
Use Pontryagin’s Minimum Principle to solve for the trajectory, lambda, control input, and the cost. But it’s kind of disgusting.